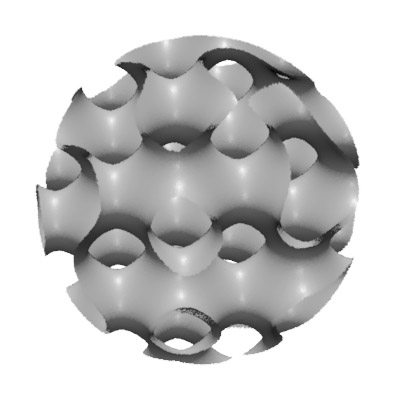
The sampling of 3D noise can also be done in a way that finds an iso-surface defined by points that have values equal, or very nearly equal, to zero. Such points can be baked into a pointcloud, subsequently converted to a brickmap and then rendered as geometry. Baking the points defined by an implicit function is not difficult. However, for a brickmap to create the illusion of a continuous surface, figure 1, requires the baking of both points and accurate normals.
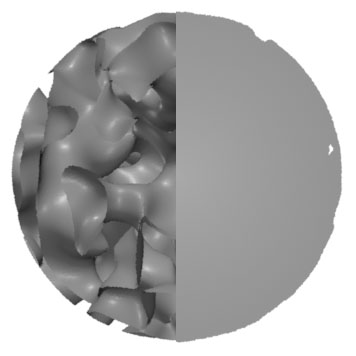
Figure 1
With and without baked normals.
As a volume shader (ray) marches from the front to the rear surface of an
enclosed shape it can detect, relatively easily, when the current
point (refer to the variable currP in listing 1) is close
to the iso-surface. Unfortunately, a
built-in RSL function (shadeop) does not exist that will enable the shader to
get information about the normal at that point. Unless the shader writer can determine the
normal from a mathematical analysis of the implicit function the only recourse
is to consider the current point as the center of a small cube (voxel) and to test
if the cube spans the iso-surface. If the voxel does span the iso-surface there
are techniques that can be used to polygonize the cube. In effect, the polygon can
be considered to be a tiny patch of the iso-surface. After polygonization the
normal to the polygon can be calculated - figure 2.