Rib
Transformations & Attributes
|
# disk2.rib
# setting the world coordinate system
Display "disk2" "framebuffer" "rgb"
Projection "perspective" "fov" 40
Format 320 240 1
Translate 0 0 3 # a transformation
WorldBegin
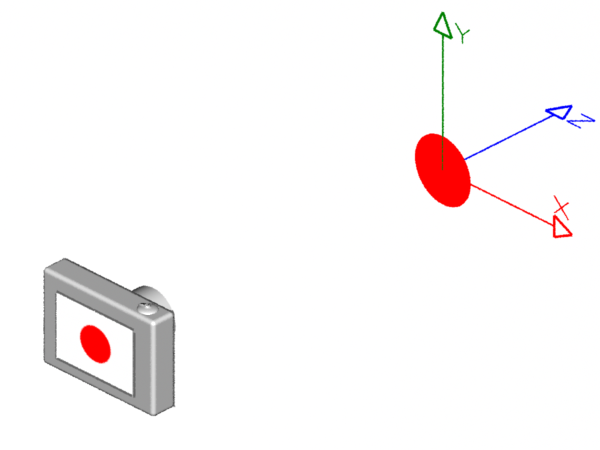
Color 1 0 0 # an attribute
Disk 0 0.25 360
WorldEnd
|
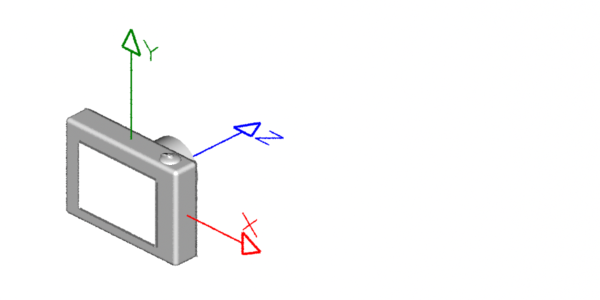
The primary 3D coordinate system in RenderMan is the camera coordinate system.
Until the renderer reads WorldBegin the camera defines the current coordinate system.
From a users point of view, applications such as Maya and Houdini enable a camera(s)
to be moved within a fixed modeling (world) space. However, internally these applications
behave in the same way as RenderMan in the sense that the world is defined after
the characteristics of the camera have been established. Therefore, it is the scene
that is orientated with respect to a fixed, or primary, camera coordinate system.
This tutorial explains what transformations and
attributes mean in the RenderMan specification. The Translate command is one of four transformations.
The others are Rotate, Scale and Skew.
The effect of these transformations will be seen in the next couple of examples. For
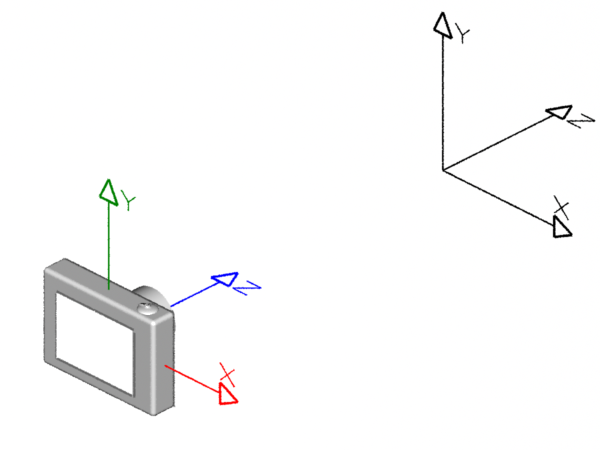
now we will focus on translations. The effect of the Translate statement is,
- to create a copy of the camera coordinate system,
- to move the copy 3 units along the z-axis of the camera.
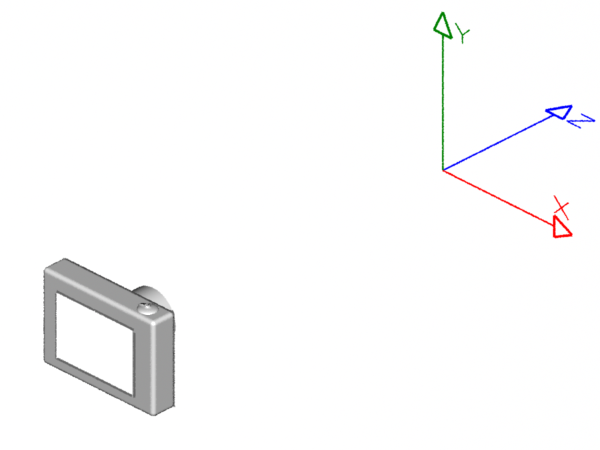
When the renderer reads WorldBegin a copy of the camera coordinate
system, now moved out in front the camera, becomes the primary or current coordinate
system. It is named the "world" coordinate system.
Transformations are accumulative. For example, these two translations,
Translate 0 0 3
Translate 0 0 3
have exactly the same effect as a single translation ie.
Translate 0 0 6
The Color statement sets a RGB value. Attributes are not acculumative ie.
Color 1 0 0
Color 0 0 1
does not specify purple. The second Color statement makes blue the current color. In
effect, the second statement replaces or hides the first color statement. The RGB
color components must be in the range 0.0 to 1.0. Unlike Maya, geometry in RenderMan
can be colorized without the use of a material. Opacity is another attribute that can
effect the transparency of an object irrespective of an objects "material" properties.
|